Current technologies of magnetic sensors often face a difficult trade-off between sensitivity, linearity, and magnetic noise. Because of their linear response and weak temperature dependence,
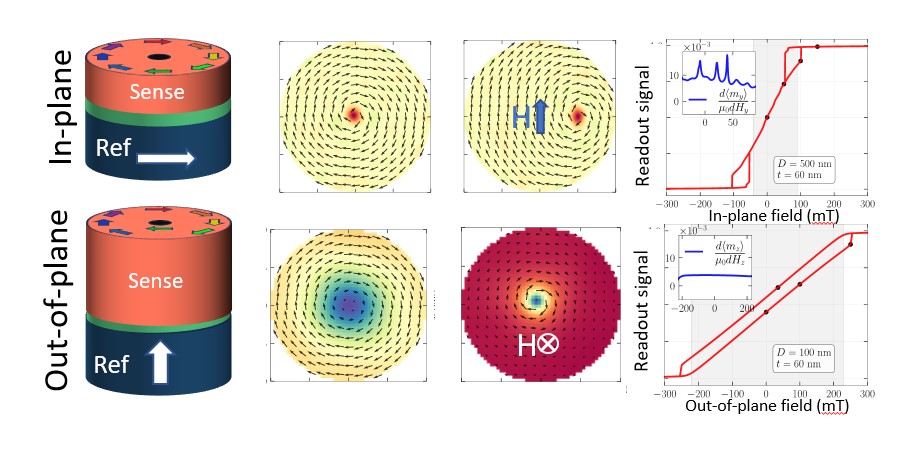
vortex sensors* represent a good compromise and are widely used as position encoders in robotics or automotive industry. Conventional vortex sensors are sensitive to magnetic fields applied in the sensor plane (see the figure above). In this configuration, the vortex core shifts transversally to the field direction, yielding a net in-plane magnetic polarization along the field direction. These sensors integrate such a vortex layer with an in-plane magnetized reference layer in a magnetic tunnel junction. These sensors are robust and weakly dependent on the operating temperature. However, they exhibit significant noise due to trapping and untrapping of their very small vortex core (core diameter~5nm) on local defects as the core moves radially under magnetic field.
In the present study, we developed another type of vortex sensor sensitive to out-of-plane field (Figure 1). Unlike their in-plane-sensitive counterparts, the aspect ratio of their vortex magnetic layer (thickness/diameter) is here much closer to 1 (thickness~60nm, diameter~100nm compared to thickness~50nm, diameter~1mm for vortex sensors sensitive to in-plane field). Consequently, the balance between exchange energy and demagnetizing energy governing the vortex configuration is drastically modified. As a result, the vortex core is larger and its diameter varies significantly under out-of-plane applied field. Since the vortex core expansion/contraction and out-of-plane polarization of the magnetization are much more reversible processes than lateral motion of the vortex core in in-plane vortex sensors, these devices exhibit lower noise and improved signal-to-noise ratio.
Thanks to their high linearity, low temperature dependence, and low noise, these sensors are particularly promising for current sensing, especially in battery management applications such as electric vehicles. In combination with sensors sensitive to in-plane magnetic fields, they can also enable
vector measurements of the magnetic field*.
Tutelles UMR : Univ. Grenoble Alpes (UGA), CEA, CNRS, Grenoble-INP UGA
Financements : ERC PoC projet Nanosense
Collaborations : PTA, sensors team