Lever le verrou d'un dégivrage sélectif et programmable
Le givrage constitue un enjeu critique pour de nombreux systèmes énergétiques et de transport, où il dégrade les performances et la sécurité. Les solutions actuelles reposent majoritairement sur des approches globales – chauffage résistif ou traitements chimiques – peu sélectives et énergivores.
Un verrou majeur réside dans la capacité à agir uniquement là et quand c'est nécessaire, en particulier pour des systèmes autonomes ou embarqués. Par ailleurs, les dispositifs issus de l'impression 4D restent le plus souvent limités à une seule stimulation, ce qui restreint leur adaptabilité fonctionnelle.
Une architecture multifonctionnelle couplant mouvement et chauffage
Les chercheurs du Laboratoire des Solides Irradiés du CEA-IRAMIS en collaboration avec l'Université Sorbonne ont développé une stratégie d'impression 4D par photopolymérisation (DLP) assistée par champ magnétique, permettant d'intégrer dans une résine des nanocharges « framboise » constituées d'un cœur de magnétite (~75 nm) recouvert de nanoparticules d'or (~18 nm).
Sous champ magnétique, ces nanocharges s'auto-assemblent en chaînes alignées, conférant au matériau deux propriétés complémentaires : une actuation magnétique, permettant une rotation et une translation contrôlées et un chauffage photothermique, déclenché par illumination lumineuse.
L'excitation plasmonique des nanoparticules d'or génère une élévation de température localisée, particulièrement efficace dans le proche infrarouge (852 nm), avec une efficacité de conversion d'environ 40 % et des températures dépassant 80 °C.
Cette double fonctionnalité permet de dissocier contrôle spatial (champ magnétique) et contrôle temporel (lumière), réalisant ainsi un pilotage spatio-temporel du dégivrage à l'échelle millimétrique.
Un démonstrateur de microrobot brise-glace autonome
Un microrobot de type « brise-glace » a été réalisé comme preuve de concept. Placé sur une surface glacée à −5 °C, il est capable de :
- fondre localement la glace en moins de 2 minutes sous illumination proche infrarouge ;
- se déplacer ensuite sous l'effet d'un champ magnétique, une fois une couche d'eau formée ;
- creuser un chenal avec une précision millimétrique, en combinant chauffage localisé et navigation.
Le mouvement du dispositif est gouverné par deux mécanismes successifs : la fusion de la glace, qui conditionne la mise en mouvement, puis l'actuation magnétique qui contrôle la trajectoire. Les performances sont maintenues après cycles thermiques jusqu'à −20 °C, attestant de la robustesse du système en conditions sévères.
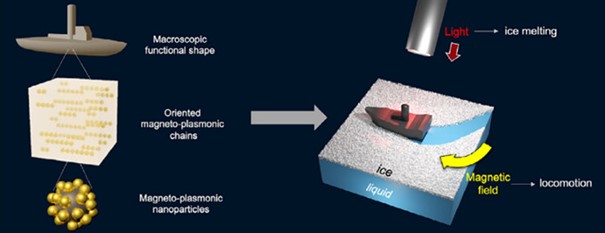 Exemple de photochauffeur imprimé en 4D utilisé comme brise-glace. Le dispositif imprimé en 4D présente une forme fonctionnelle macroscopique (par exemple, un navire brise-glace) et intègre des charges magnéto-plasmoniques alignées sous forme de chaînes. Le champ magnétique assure la locomotion (positionnement spatial), tandis que l'irradiation lumineuse permet un déclenchement thermique (contrôle temporel de la vitesse de fusion).
Exemple de photochauffeur imprimé en 4D utilisé comme brise-glace. Le dispositif imprimé en 4D présente une forme fonctionnelle macroscopique (par exemple, un navire brise-glace) et intègre des charges magnéto-plasmoniques alignées sous forme de chaînes. Le champ magnétique assure la locomotion (positionnement spatial), tandis que l'irradiation lumineuse permet un déclenchement thermique (contrôle temporel de la vitesse de fusion).
Une nouvelle plateforme pour la robotique et la gestion thermique
Cette étude démontre pour la première fois l'intégration, au sein d'un objet imprimé en 4D, de fonctions magnétiques et plasmoniques couplées mais indépendantes, sans connexion filaire. Elle ouvre la voie à des dispositifs capables de délivrer de l'énergie localement tout en se positionnant de manière autonome.
Au-delà du dégivrage, cette approche constitue une avancée pour la conception de matériaux et systèmes multistimuli-responsifs*, avec des perspectives en robotique souple, en environnements extrêmes et plus largement pour des dispositifs adaptatifs et programmables dans le temps.
*dispositifs répondant à plusieurs stimuli, ici la lumière et le champ magnétique